
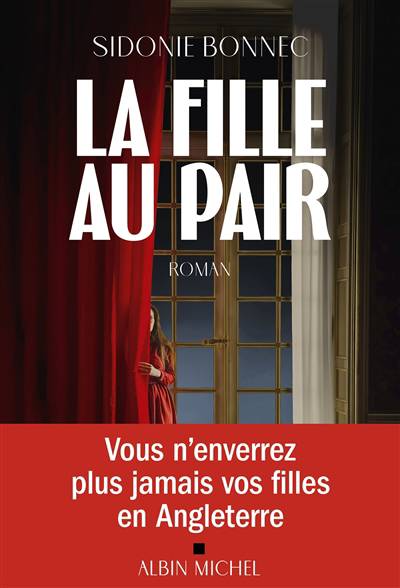
- Retrait gratuit dans votre magasin Club
- 7.000.000 titres dans notre catalogue
- Payer en toute sécurité
- Toujours un magasin près de chez vous
- Retrait gratuit dans votre magasin Club
- 7.000.0000 titres dans notre catalogue
- Payer en toute sécurité
- Toujours un magasin près de chez vous


Bilateral Teleoperation of a Planetary Rover with Time Delays
A Master thesis from SpaceMaster, a Joint European Master in Space Science and Technology
Zhihao Xu
Livre broché | Anglais
48,45 €
+ 96 points
Description
This thesis work addresses the bilateral teleoperation of a planetary rover, named MERLIN (Mobile Experimental Robot for Localization and Intelligent Navigation). The teleoperation platform is built up between the rover and a haptic device. The haptic device provides a force-feedback mechanism, which describes the environmental conditions regarding the obstacles, based on the ranging information from the rover. Therefore, obstacle avoidance can be achieved independent of the visualization of the environment, which, on the other hand, will reduce the communication burden. This can be highly desirable in low-light conditions and in remote teleoperation cases, in which difficulties may arise in visualizing the surroundings. Communication delay is the main concern in this thesis work, because it will result in poor performance of the overall system and even lead to instability of the closed-loop teleoperation. The technology developed in this thesis work will improve the quality of navigating MERLIN rovers. and provide basics for teleoperation of multiple mobile robots, as well as robotic maneuvers by means of mobile manipulators.
Spécifications
Parties prenantes
- Auteur(s) :
- Editeur:
Contenu
- Nombre de pages :
- 96
- Langue:
- Anglais
Caractéristiques
- EAN:
- 9783838310527
- Date de parution :
- 21-05-10
- Format:
- Livre broché
- Dimensions :
- 152 mm x 229 mm
- Poids :
- 150 g

Les avis
Nous publions uniquement les avis qui respectent les conditions requises. Consultez nos conditions pour les avis.