
- Retrait gratuit dans votre magasin Club
- 7.000.000 titres dans notre catalogue
- Payer en toute sécurité
- Toujours un magasin près de chez vous
- Retrait gratuit dans votre magasin Club
- 7.000.000 titres dans notre catalogue
- Payer en toute sécurité
- Toujours un magasin près de chez vous


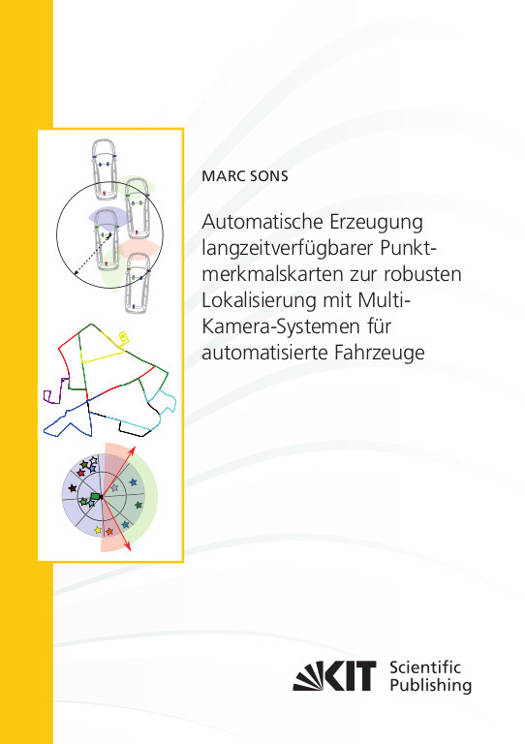
Automatische Erzeugung langzeitverfügbarer Punktmerkmalskarten zur robusten Lokalisierung mit Multi-Kamera-Systemen für automatisierte Fahrzeuge
Marc Sons
Livre broché | Allemand | Schriftenreihe / Institut für Mess- und Regelungstechnik, Karlsruher Institut für Technologie | n° 47
44,45 €
+ 88 points
Description
Hochautomatisierte Fahrzeuge benötigen eine präzise Eigenlokalisierung, um sich zuverlässig, sicher und effizient im innerstädtischen Straßenverkehr zu bewegen. Diese Arbeit präsentiert eine vollumfängliche Methode zur Erstellung und Aktualisierung von hochgenauen 3D-Lokalisierungskarten und eine Methode zur präzisen und robusten Lokalisierung mit Multi-Kamera-Systemen. Automated vehicles heavily rely on accurate self-localization to operate safely and efficiently in dynamic road traffic scenarios. In this work, an iterative and robust approach to create highly accurate maps comprising any number of drives of arbitrary length with constant computation complexity is proposed. Furthermore, a high-precision self-localization method using multiple cameras covering the surrounding environment is presented.
Spécifications
Parties prenantes
- Auteur(s) :
- Editeur:
Contenu
- Nombre de pages :
- 182
- Langue:
- Allemand
- Collection :
- Tome:
- n° 47
Caractéristiques
- EAN:
- 9783731510291
- Format:
- Livre broché
- Dimensions :
- 148 mm x 11 mm
- Poids :
- 345 g

Les avis
Nous publions uniquement les avis qui respectent les conditions requises. Consultez nos conditions pour les avis.